Eco3D The Cyber-Physical 3D Ecosystem



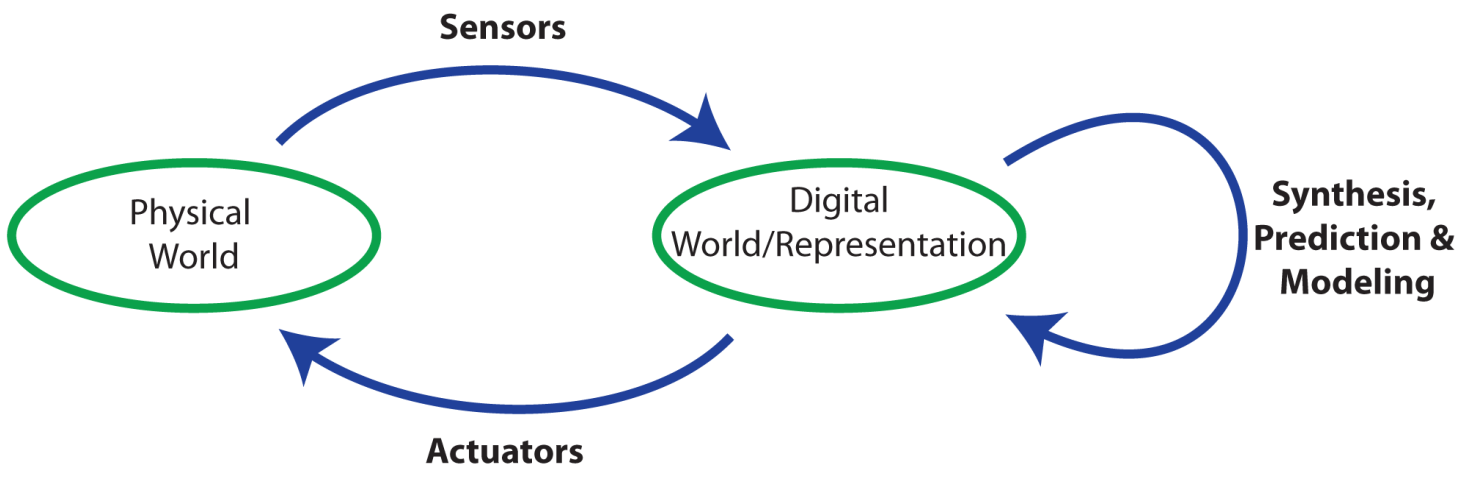
Eco3D is an initiative started by Jeppe Revall Frisvad, Knut Conradsen, and Henrik Aanæs to coordinate our research activities in sensors and 3D geometric and radiometric modeling in relation to the cyber-physical 3D ecosystem. This ecosystem is an abstraction of the fact that we oftentimes wish to manipulate the physical world based on sensor generated digital or cyber models of this physical world. This is illustrated in the following diagram.
This ecosystem encompasses much of the research we do at the Section for Visual Computing at the Technical University of Denmark, and is as such a nice framework for exploiting the possible synergies within our group. Examples of this ecosystem are
- Scanning an object in 3D, designing a fixture for it, and 3D printing the fixture.
- Doing 3D stereo of an object to determine its pose, and then gripping with a robot.
- Scanning a manufactured part, and based on 3D and radiometric specifications doing quality control, and ultimately rejecting or accepting it.
As seen under People, this initiative has a sufficient number of participants, working on parts of the ecosystem. A benefit of taking the holistic ecosystem approach to our research is that it also enforces relevant performance metrics on our research in the individual parts. In 2015, the first year of the initiative, our collaboration has focus on
- Investigating what taking a holistic ecosystem approach actually implies, especially in a 3D printing and copy machine setting.
- Generating high quality data sets with high quality ground truth, to have good empirical evidence for our research. This is relevant in an ecosystem approach, in that it e.g. implies that hard precision requirements are needed for actuators to function. We have a great opportunity for doing this, due to our relatively well developed Image Lab, see Facilities.
Current research projects
3D Scanning
We investigate the process of optical surface scanning to see if the statistical quality can reach a level high enough for such a scanner to be used as a full grade metrological device.
3D printing
We focus on digitalization and quality control of the 3D printing process. We also develop and evaluate novel 3D printing (additive manufacturing) systems for use within the design space of manufacturing and rapid prototyping.
Appearance
We create efficient rendering techniques and mathematical models that predict the appearance of materials from their physical microstructure. The goal is to interactively compute realistic images of real-world materials.
BRDF Acquisition
Having densly sampled BRDFs of the surface of each object in a given scene allows for photorealistic rendering of that scene. This project aims at better acquisition of surface BRDFs in 3D scenes composed of simple geometries.
Non-Rigid Structure From Motion
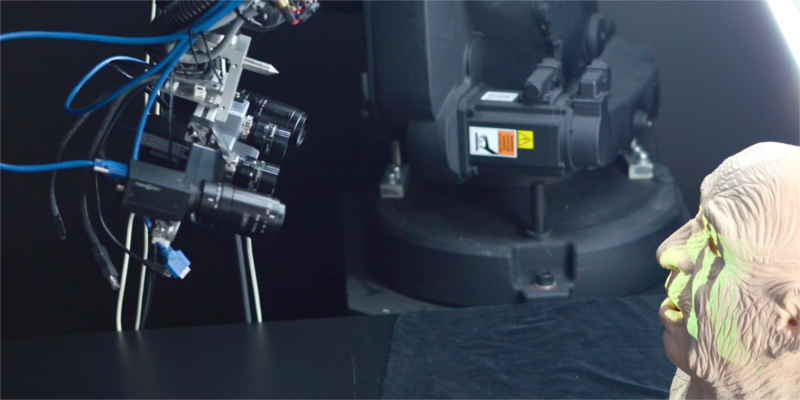
We create a realistic dataset for evaluation of Non-Rigid Structured From Motion algorithms. The dataset provides a dense point set with an accurate ground truth. This is accomplished through stop-motion animated animatronics with dense structured light scanning for each frame.
Transparency
We have created a multi-view stereo (MVS) dataset where the focus is on reconstruction of geometry and appearance. Three glass objects with different radiometric properties are selected and multiple MVS scenes are captured, reconstructed and rendered.
Recent Publications

Validated predictive rendering of translucent materials [2025]
D. M. TranDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Object appearance representation and rendering: a neural approach to light transport simulation in translucent media [2025]
T. TGDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Digitizing the appearance of 3D printing materials using a spectrophotometer [2024]
A. Pranovich, M. R. Hannemose, J. N. Jensen, D. M. Tran, H. Aanæs, S. Gooran, D. Nyström, J. R. FrisvadSensors , 24(21), 7025

NeuPreSS: compact neural precomputed subsurface scattering for distant lighting of heterogeneous translucent objects [2024]
T. TG, J. R. Frisvad, R. Ramamoorthi, H. W. JensenComputer Graphics Forum , 43(7), e15234

3D printing control for surface appearance features [2024]
R. TonelloDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Neural SSS: lightweight object appearance representation [2024]
T. TG, D. M. Tran, H. W. Jensen, R. Ramamoorthi, J. R. FrisvadComputer Graphics Forum , 43(4), e15158

Digitizing translucent object appearance by validating computed optical properties [2024]
D. M. Tran, M. B. Jensen, P. Santafé-Gabarda, S. Källberg, A. Ferrero, M. R. Hannemose, J. R. FrisvadApplied Optics , 63(16), 4317-4331

Influence of the printing direction on the surface appearance in multi-material fused filament fabrication [2024]
R. Tonello, M. T. Mollah, K. Weiss, J. Spangenberg, A. Strandlie, D. B. Pedersen, J. R. FrisvadComputer-Aided Design and Computer Graphics (CAD/Graphics 2023) , Springer, 14250, 90—107

Surface roughness of as-printed polymers: a comprehensive review [2023]
A. P. Golhin, R. Tonello, J. R. Frisvad, S. Grammatikos, A. StrandlieThe International Journal of Advanced Manufacturing Technology , 127(3-4), 987-1043

Surface roughness and grain size variation when 3D printing polyamide 11 parts using selective laser sintering [2023]
R. Tonello, K. Conradsen, D. B. Pedersen, J. R. FrisvadPolymers , 15(13), 2967

Fast impression painting using multi-color fused deposition modeling with a diamond hotend [2022]
R. Tonello, F. Abedini, D. B. Pedersen, J. R. FrisvadASPE and euspen Summer Topical Meeting on Advancing Precision in Additive Manufacturing , 83-87

Instrumentation for Estimating Surface Radiometry [2021]
M. E. B. DoestDepartment of Applied Mathematics and Computer Science, Technical University of Denmark
A benchmark and evaluation of non-rigid structure from motion [2021]
S. H. N. Jensen, M. E. B. Doest, H. Aanæs, A. Del_BueInternational Journal of Computer Vision , 129(4), 882-899

Estimating and Simulating Structure and Motion [2021]
J. N. JensenDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Surface reconstruction from structured light images using differentiable rendering [2021]
J. N. Jensen, M. Hannemose, J. A. Bærentzen, J. Wilm, J. R. Frisvad, A. B. DahlSensors , 21(4), 1068
Multi-Scale Radiative Transfer Simulation for the Scattering of Light by Microgeometry [2020]
V. FalsterDepartment of Applied Mathematics and Computer Science, Technical University of Denmark
Differentiable Formulations for Inverse Rendering [2020]
M. HannemoseDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Alignment of rendered images with photographs for testing appearance models [2020]
M. Hannemose, M. E. B. Doest, A. Luongo, S. K. S. Gregersen, J. Wilm, J. R. FrisvadApplied Optics , 59(31), 9786-9798

Computing the bidirectional scattering of a microstructure using scalar diffraction theory and path tracing [2020]
V. Falster, A. Jarabo, J. R. FrisvadComputer Graphics Forum (PG 2020) , 39(7), 231-242

Survey of models for acquiring the optical properties of translucent materials [2020]
J. R. Frisvad, S. A. Jensen, J. S. Madsen, A. Correia, L. Yang, S. K. S. Gregersen, Y. Meuret, P. HansenComputer Graphics Forum (EG 2020) , 39(2), 729-755

Microstructure control in 3D printing with digital light processing [2020]
A. Luongo, V. Falster, M. E. B. Doest, M. M. Ribo, E. R. Eiriksson, D. B. Pedersen, J. R. FrisvadComputer Graphics Forum , 39(1), 347-359

Measurement of polymers with 3D optical scanners: evaluation of the subsurface scattering effect through five miniature step gauges [2020]
M. G. Guerra, S. S. Gregersen, J. R. Frisvad, L. De_Chiffre, F. Lavecchia, L. M. GalantucciMeasurement Science and Technology , 31(1), 015010

Optimal, non-rigid alignment for feature-preserving mesh denoising [2019]
F. Gawrilowicz, J. A. BærentzenProceedings of 3DV 2019 , 415-423

Superaccurate camera calibration via inverse rendering [2019]
M. Hannemose, J. Wilm, J. R. FrisvadModeling Aspects in Optical Metrology VII , Proceedings of SPIE, vol. 11057, 1105717

Using a robotic arm for measuring BRDFs [2019]
R. A. Lyngby, J. B. Matthiassen, J. R. Frisvad, A. B. Dahl, H. AanæsImage Analysis (Proceedings of SCIA 2019) , Lecture Notes in Computer Science, vol. 11482, 184-196

Material-based segmentation of objects [2019]
J. D. Stets, R. A. Lyngby, J. R. Frisvad, A. B. DahlImage Analysis (Proceedings of SCIA 2019) , Lecture Notes in Computer Science, vol. 11482, 152-163

Predicting and 3D Printing Material Appearance [2019]
A. LuongoDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Development and metrological validation of a new automated scanner system for freeform measurements on wind turbine blades in the production [2019]
R. A. Lyngby, E. Nielsen, L. De_Chiffre, H. Aanæs, A. B. DahlPrecision Engineering , 56, 255-266

Single-shot analysis of refractive shape using convolutional neural networks [2019]
J. D. Stets, Z. Li, J. R. Frisvad, M. ChandrakerIEEE Winter Conference on Applications of Computer Vision , 995-1003

Autonomous Optical Inspection of Large Scale Freeform Surfaces [2018]
R. A. LyngbyDepartment of Applied Mathematics and Computer Science, Technical University of Denmark
Towards Interactive Photorealistic Rendering [2018]
A. Dal_CorsoDepartment of Applied Mathematics and Computer Science, Technical University of Denmark
A benchmark and evaluation of non-rigid structure from motion [2018]
S. H. N. Jensen, A. Del_Bue, M. E. B. Doest, H. AanæsarXiv:1801.08388v2

Modeling the anisotropic reflectance of a surface with microstructure engineered to obtain visible contrast after rotation [2017]
A. Luongo, V. Falster, M. B. Doest, D. Li, F. Regi, Y. Zhang, G. Tosello, J. B. Nielsen, H. Aanæs, J. R. FrisvadProceedings of International Conference on Computer Vision Workshop (ICCVW 2017) , IEEE, 159-165

A variational study on BRDF reconstruction in a structured light scanner [2017]
J. B. Nielsen, J. D. Stets, R. A. Lyngby, H. Aanæs, A. B. Dahl, J. R. FrisvadProceedings of International Conference on Computer Vision Workshop (ICCVW 2017) , IEEE, 143-152

Scene reassembly after multimodal digitization and pipeline evaluation using photorealistic rendering [2017]
J. D. Stets, A. Dal_Corso, J. B. Nielsen, R. A. Lyngby, S. H. N. Jensen, J. Wilm, M. B. Doest, C. Gundlach, E. R. Eiriksson, K. Conradsen, A. B. Dahl, J. A. Bærentzen, J. R. Frisvad, H. AanæsApplied Optics , 56(27), 7679-7690

Robot Based BRDF Measurement System [2017]
M. E. B. DoestDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Computer Vision for Additive Manufacturing [2017]
E. R. EirikssonDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Augmented reality interfaces for additive manufacturing [2017]
E. R. Eiriksson, D. B. Pedersen, J. R. Frisvad, L. Skovmand, V. Heun, P. Maes, H. AanæsImage Analysis (Proceedings of SCIA 2017) , Springer, Lecture Notes in Computer Science, vol. 10269, 334-345
An error analysis of structured light scanning of biological tissue [2017]
S. H. N. Jensen, J. Wilm, H. AanæsImage Analysis (Proceedings of SCIA 2017) , Springer, Lecture Notes in Computer Science, vol. 10269, 135-145

On Practical Sampling of Bidirectional Reflectance [2016]
J. B. NielsenDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Designing for color in additive manufacturing [2016]
E. R. Eiriksson, A. Luongo, J. R. Frisvad, D. B. Pedersen, H. AanæsProceedings of ASPE 2016 Summer Topical Meeting on Dimensional Accuracy and Surface Finish in Additive Manufacturing , 98-102

In-situ monitoring in additive manufacturing using contact image sensors [2016]
D. B. Pedersen, E. R. Eiriksson, H. Aanæs, H. N. HansenProceedings of the ASPE 2016 Summer Topical Meeting on Dimensional Accuracy and Surface Finish in Additive Manufacturing , 114-118

Interactive appearance prediction for cloudy beverages [2016]
A. Dal_Corso, J. R. Frisvad, T. K. Kjeldsen, J. A. BærentzenWorkshop on Material Appearance Modeling (MAM 2016) , The Eurographics Association, 1-4

Hybrid fur rendering: combining volumetric fur with explicit hair strands [2016]
T. G. Andersen, V. Falster, J. R. Frisvad, N. J. ChristensenThe Visual Computer , 32(6), 739-749

Precision and accuracy parameters in structured light 3-D scanning [2016]
E. R. Eiriksson, J. Wilm, D. B. Pedersen, H. AanæsInternational Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences , XL-5/W8, 7-15

Real Time Structured Light and Applications [2016]
J. WilmDepartment of Applied Mathematics and Computer Science, Technical University of Denmark

Large-scale data for multiple-view stereopsis [2016]
H. Aanæs, R. R. Jensen, G. Vogiatzis, E. Tola, A. B. DahlInternational Journal of Computer Vision , Springer, 1-16

Interactive directional subsurface scattering and transport of emergent light [2016]
A. Dal_Corso, J. R. Frisvad, J. Mosegaard, J. A. BærentzenThe Visual Computer , 33(3), 371-383

On optimal, minimal BRDF sampling for reflectance acquisition [2015]
J. B. Nielsen, H. W. Jensen, R. RamamoorthiACM Transactions on Graphics (TOG) , 34(6), 186:1-186:11

Our 3D vision data-sets in the making [2015]
H. Aanæs, K. Conradsen, A. Dal_Corso, A. B. Dahl, A. D. Bue, M. E. B. Doest, J. R. Frisvad, S. H. N. Jensen, J. B. Nielsen, J. D. Stets, G. VogiatzisConference on Computer Vision and Pattern Recognition 2015 , Institute of Electrical and Electronics Engineers

Accuracy in robot generated image data sets [2015]
H. Aanæs, A. B. DahlImage Analysis (Proceedings of SCIA 2015) , Springer, Lecture Notes in Computer Science, vol. 9127, 472-479

Quality assurance based on descriptive and parsimonious appearance models [2015]
J. B. Nielsen, E. R. Eiriksson, R. L. Kristensen, J. Wilm, J. R. Frisvad, K. Conradsen, H. AanæsWorkshop on Material Appearance Modeling , The Eurographics Association, 21-24

Predicting color output of additive manufactured parts [2015]
E. R. Eiriksson, D. B. Pedersen, H. AanæsProceedings of ASPE 2015 Spring Topical Meeting on Achieving Precision Tolerances in Additive Manufacturing

Large scale multi-view stereopsis evaluation [2014]
R. R. Jensen, A. Dahl, G. Vogiatzis, E. Tola, H. Aanæs2014 IEEE Conference on Computer Vision and Pattern Recognition , 406-413